在現代自動化包裝產線中,高速、高精度、多工站協同一直是技術攻關的難點。今天,我們將走進一條高效的擰蓋裝盒包裝線,看高創運動控制方案如何以MC804運動控制器為核心,搭配BD3E伺服驅動器與PH3電機,驅動蜘蛛手與R2機器人,實現每分鐘超過50瓶的穩定生產。
多機器人協同的智能包裝系統
該包裝線主要包含旋蓋與裝盒兩大核心工站,由Delta蜘蛛手、R2機器人及多臺六關節機器人共同完成。
1.旋蓋工站
蜘蛛手上料:視覺系統對托盤中的瓶蓋進行定位,蜘蛛手精準抓取,并放置于間歇運動的料帶上。料帶每次前進5個瓶蓋距離,為R2機器人持續供料。
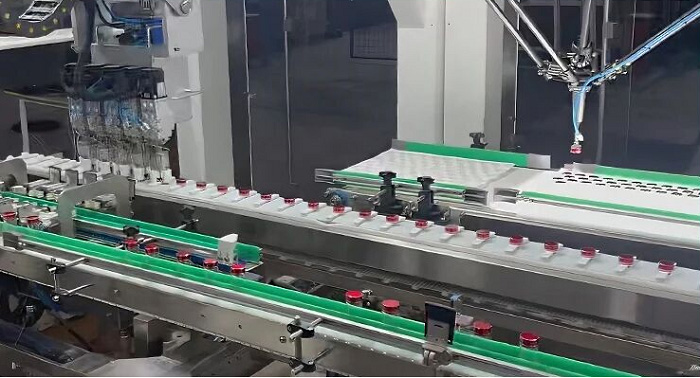
R2機器人取蓋旋蓋:R2機器人一次性抓取5個瓶蓋,移送至對應瓶口上方,通過集成在末端的5個擰緊伺服單元完成擰蓋動作,隨后將瓶子放至下料皮帶,輸送至裝盒工站。
2.裝盒工站
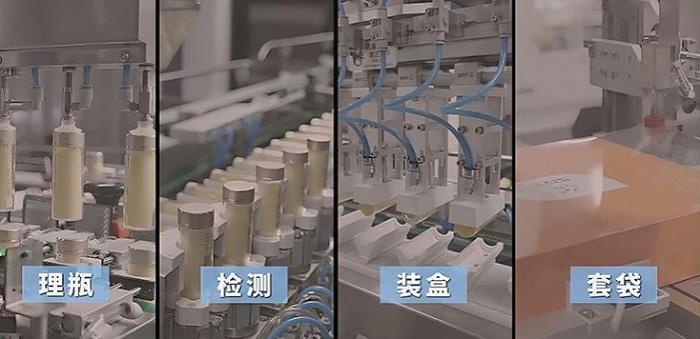
一臺R2機器人與6臺標準六關節機器人通過網絡協同作業,共同完成理瓶、檢測、裝盒、套袋等一系列工序,實現全流程自動化。
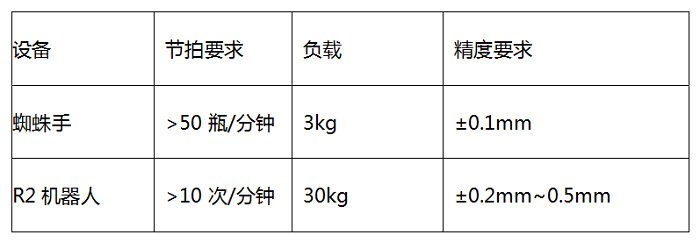
控制要求:
通訊集成:支持ModbusRTU控制步進電機;支持ModbusTCP與6臺機器人及視覺系統實時通訊。除機器人本體控制外,系統還需實現:
工藝配合:視覺定位、動態跟蹤放料、扭矩控制擰蓋、多機協同路徑規劃等。
控制要點實現
蜘蛛手動態跟蹤放料:通過傳感器實時捕捉料帶位置,結合MC804高速運算能力,實現放料過程中的動態追蹤與精準放置。
R2機器人路徑優化:針對負載大、速度高的特點,進行運動軌跡與加減速優化,確保運行平穩、定位準確。
扭矩控制擰蓋:通過BD3E驅動器精準的扭矩模式,實現瓶蓋擰緊工藝,避免過緊或松脫。
多機器人協同:基于ModbusTCP實現中央調度,確保各機器人動作連貫、無沖突。
高創方案核心價值
1.強勁性能,一機多控
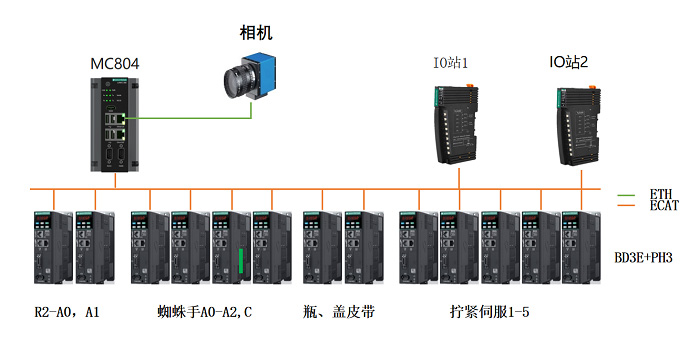
MC804控制器內置雙核2GHzCPU,一個控制器即可同步控制:
· 1臺蜘蛛手(Delta機器人)
· 1臺R2機器人
· 7個輔助軸(擰緊伺服、步進電機等)
控制周期低至2ms,所有邏輯與運動控制集成于同一程序,不僅大幅簡化編程與調試,更提升了系統響應速度與同步精度,完美支撐產線>50瓶/分鐘的高速節拍。
2.接口豐富,組網靈活
自帶RS485接口,通過ModbusRTU協議直接控制步進電機,節省額外控制模塊。
自帶千兆網口,支持ModbusTCP通訊,輕松與6臺六關節機器人、視覺系統組網,實現數據實時交互與協同調度。
3.定制開發,快速交付
高創不僅提供標準蜘蛛手模型,更為客戶定制開發R2機器人模型,并配套專用程序模板。客戶可直接基于成熟架構進行工藝調整,顯著縮短項目開發周期,加快投產進度。
4.高效穩定,性價比突出
該產線自投入運行以來,持續穩定達到設計節拍,生產效率與產品一致性獲得客戶高度認可。MC804控制器以單機集成多系統的方式,在保證性能的同時,降低了硬件成本與系統復雜度,為客戶提供了更高性價比的整體解決方案。
從精準取放、高速旋蓋到多機協同包裝,高創憑借MC804運動控制器+BD3E伺服驅動器+PH3電機的組合,展現了在復雜機器人協同場景中的強大技術整合與控制能力。我們不僅提供硬件,更提供貼合工藝的定制化開發與全程技術支持,助力客戶智能制造升級。